Category:9-axis
(Redirected from IMU)
| Header text | Header text | Header text |
|---|---|---|
| BNO085 | Example | Example |
| Example | Example | Example |
| Example | Example | Example |
- Redirect to MPU series sensor here MPU.
Guide
- MPU-9250
- MPU-9255
| Sensor Name | Status | Company | Type | Sub-type | Interface | Sensing accuracy/range | Power |
|---|---|---|---|---|---|---|---|
| MPU-9150 | invensense | IMU-3-Axis gyroscope + 3-Axis Accelerator + 3-Axis magnetometer/compass | Digital | IIC | 250/500/1000/2000 dps; ±1200uT; ±16g |
9-10 DOF Integration IMU
| Model | Type | Accelerator | Gyroscope | Magnetometer | Barometer | Status |
|---|---|---|---|---|---|---|
| EY86 | 10 DOF | MPU-6050 | MPU-6050 | HMC5883L | MS5611 | retired |
| EY88 | 10 DOF | MPU-6050 | MPU-6050 | HMC5883L | BPM085 | retired |
| EY951 | 9 DOF | ADXL345 | ITG-3200 | HMC5883L | - | |
| EY652 | - | - | - | HMC5983 | BMP180 | |
| EY952 | - DOF Serial Output | - | ||||
| EY-91 | 10 DOF | MPU-9250 | MPU-9250 | MPU-9250 | BMP280 |
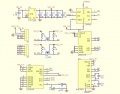
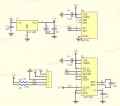
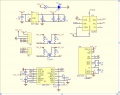
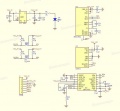
Schematic
- File:9DOF module schematic.pdf, a few parts maybe updated, please be aware.
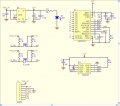
10DOF EY-91 schematic
EY80: BMP085, ADXL345, MHC5883, L3G4200D
EY652: HMC5983+BMP180
EY88: BMP085, MHC5883, MPU-6050
EY86: MS5611, HMC5883, MPU-6050





- Dimension

EY86

User reference
- Use arduino I2C scanner you can find the device address, here: I2C_Scanner
- A demo sketch available at here for EY80.
Documents
- ADXL345
- HMC5883L
- Reference tutorial 1 - Head Tracker
- Firmware - File:AHRS-firmware V1.4.1.zip